Methodology
We focus on unsupervised learning from plain images and discovering dexterous control over various utensils. Our method employs a hierarchical structure encompassing a CNN-encoded LSTM model to deduce stroke-level orders, and a reinforcement learning (RL) pipeline to fine-tune the coarse sequences into tool-aware stylized control, controlling the brush agent with soft-actor-critic (SAC) algorithm.
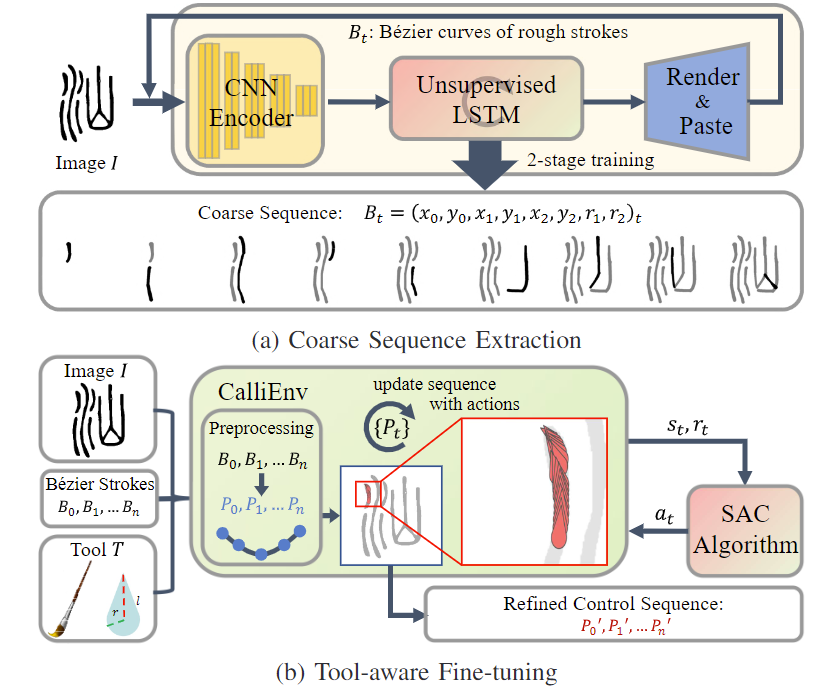
An overview of the training process of CalliRewrite pipeline. We develop our coarse sequence extraction module based on Mo et al. and propose tailored unsupervised loss functions for human-like glyph decomposition. In the second phase, we formulate the task into a constrained optimization task, leveraging SAC algorithm on our crafted environment to finetune dexterous control sequences. Coarse sequences are set into initial states to curtail ineffective exploration and boost training.